新能源汽车的核心部件:旋变传感器的工作原理与应用
在新能源汽车的驱动系统中,旋变传感器扮演着至关重要的角色。它是一种用于检测电机转子位置和速度的装置,其工作原理基于电磁感应和变压器原理。通过旋变传感器,控制系统能够实时获取电机的位置和速度信息,从而实现对电机的高效控制。
专注于新能源汽车及三电领域的知识与资讯
本文旨在分享与新能源汽车及其关键部件相关的知识和最新资讯。其中,旋变传感器作为新能源汽车驱动系统中的核心部件,其工作原理与应用是本文的重点讨论对象。
开关霍尔传感器因其特性,常被用于对精度要求不高、工况单一且成本较低的小控制器中。然而,对于车用大电机而言,旋转变压器(简称旋变)这类位置传感器则更为适用。接下来,我们将深入探讨旋变的相关知识。
首先,让我们了解一下旋变的工作原理。旋转变压器,作为电机控制中的关键位置传感器,其核心作用是反映电机的转子位置,并为软件提供必要的电机控制算法数据。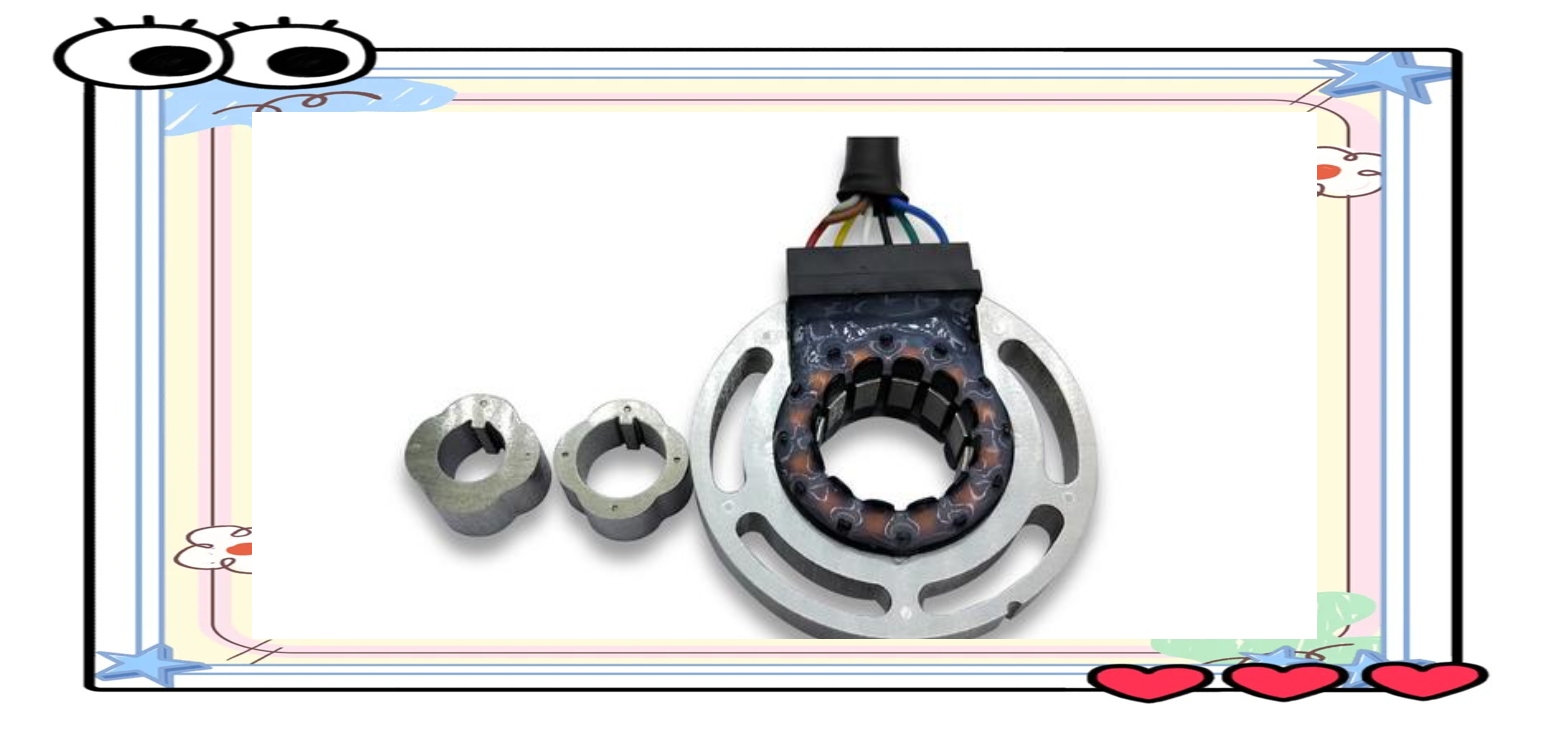
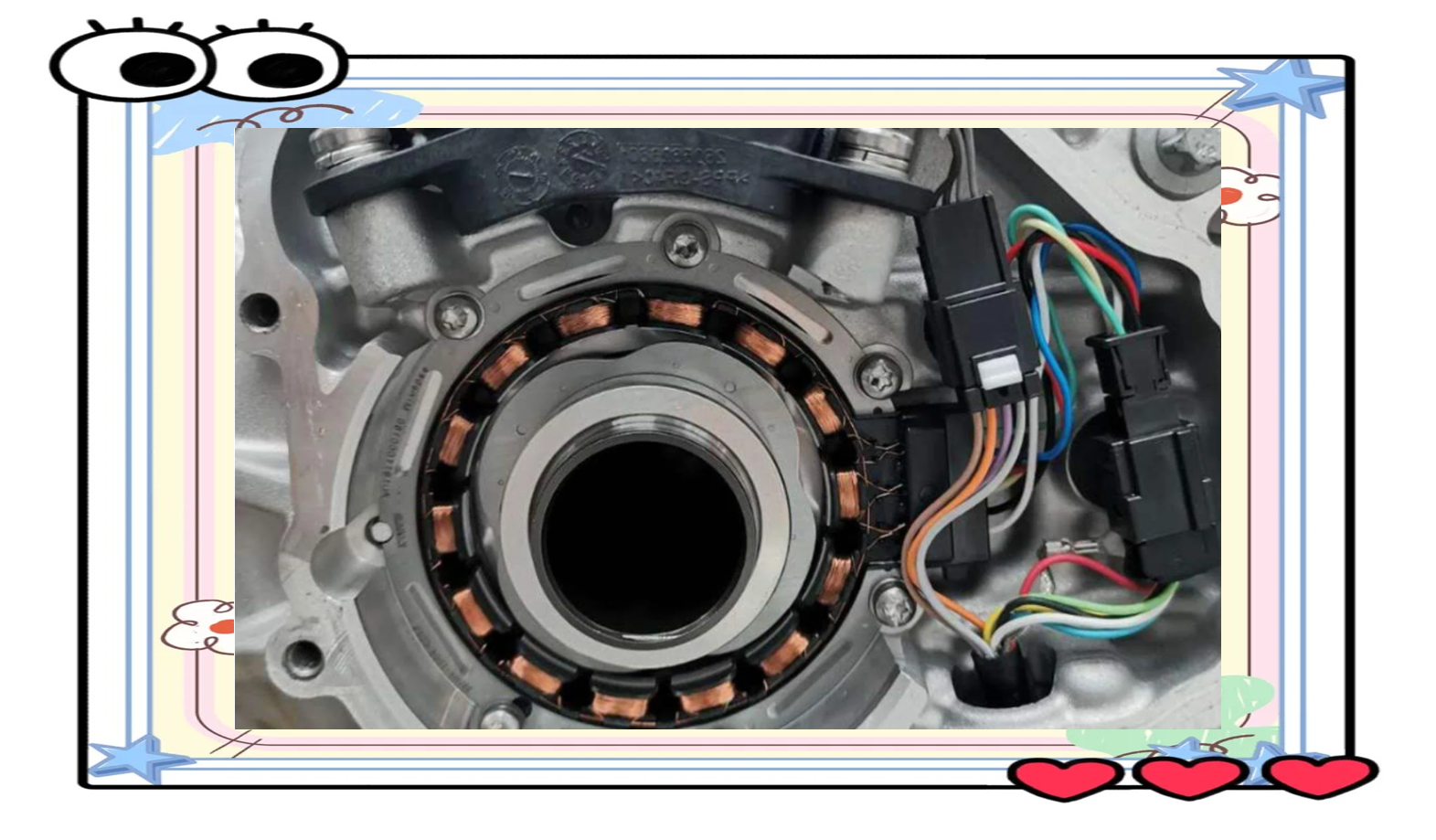
旋变,这一在电机控制中发挥着关键作用的位置传感器,其工作原理可以这样理解:它类似于一个小型电机,同样具备定子和转子两个部分。在实际应用中,旋变的转子会被安装在电机的转轴上,随之与电机一同旋转。在旋转过程中,转子会在定子线圈中感应出有关位置的信息,这些信息再经过定子线圈的传递,最终被获取,从而实现对电机转子位置的精准反映。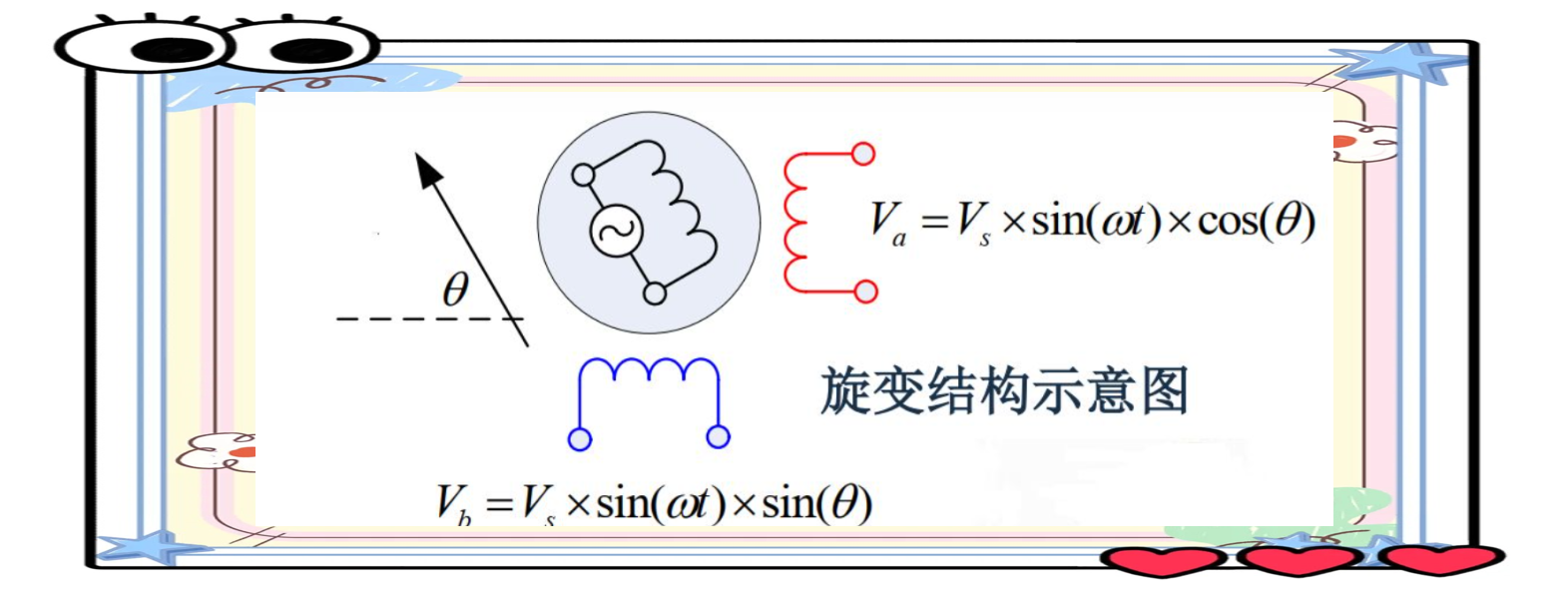
旋变的结构如上图所示,其中R1R2线圈作为转子线圈,而S1S2、S3S4则是互相垂直的定子线圈。当R1R2中通入高频正弦信号时,该信号被称为激励信号。这一激励信号会在次级线圈中感应出高频感应信号,该信号包含了位置信息包络。通过提取返回的感应信号中的包络,我们可以获取到对应的正余弦信息。经过硬解码或软解码等处理后,便能得到定子的绝对位置信息。接下来,我们将详细推导这一过程。
设激励信号为:
Vα=Vs∗sin(ωt)
在旋变中,激励线圈与水平的夹角为θ。结合激励线圈中的信号,我们可以分别推导出两个感应线圈中的信号:
Va=Vs∗sin(ωt)∗cos(θ)
Vb=Vs∗sin(ωt)∗sin(θ)
由此,我们可以得到激励、正弦及余弦的波形图如下: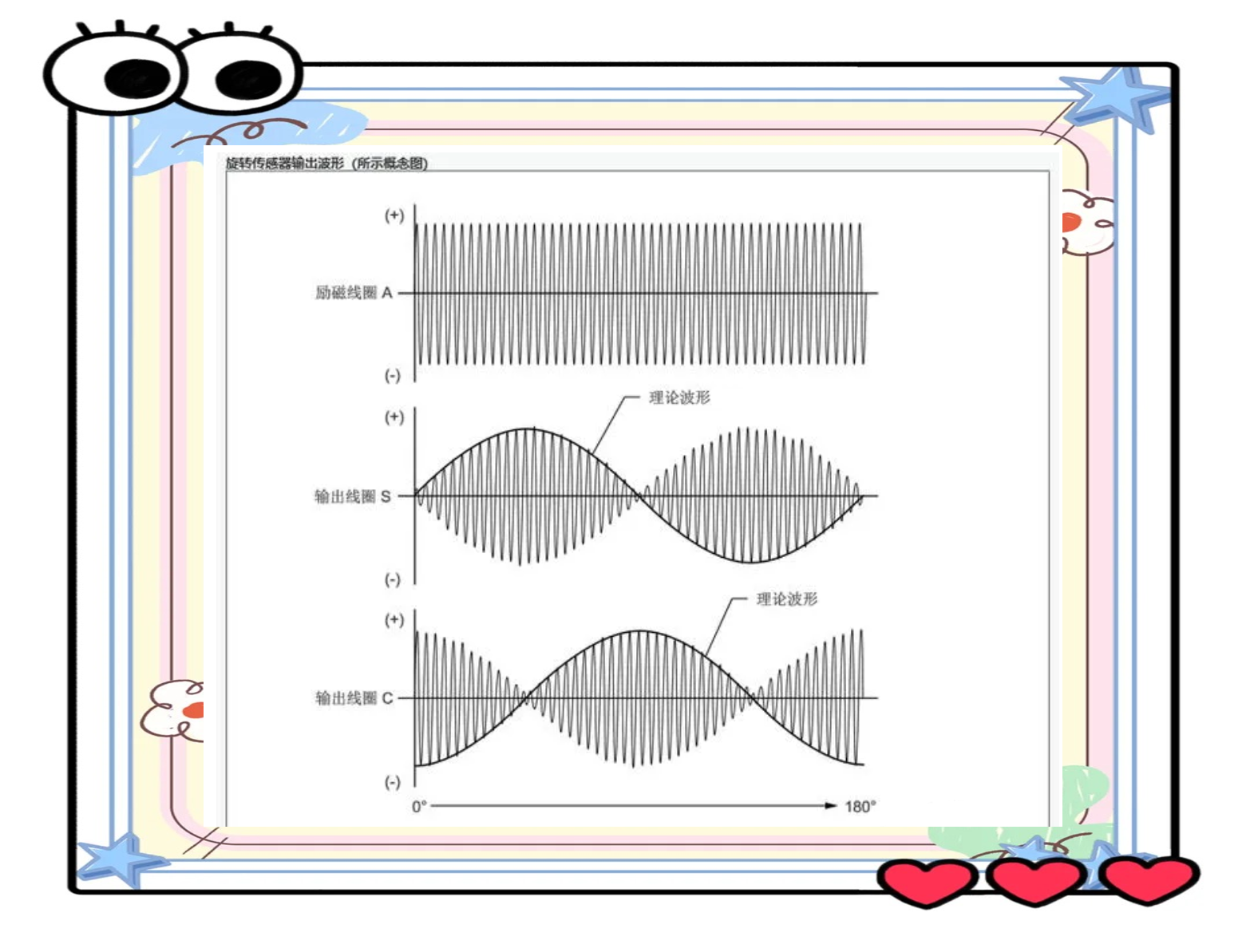
其中,正余弦的波形呈现为幅值不断变化的正弦曲线。通过前面的方程,我们可以清晰地看到,正弦曲线实际上是由激励源所产生的。而幅值的不断变化,则源于旋转过程中激励线圈与次级线圈夹角θ的持续变化,从而产生了这种特定的波形。值得注意的是,这个波形的外包络,即图示中的黑线部分,正是我们所需要提取的正余弦信号。
因此,在解码过程中,我们只需捕获并提取这些正余弦信号的外包络,便能获得转子的绝对位置信息。
综上所述,在深入了解旋变的主要结构和工作原理后,我们不难发现,旋变的应用核心在于激励信号的产生以及正余弦信号外包络的提取与角度计算。而激励信号的产生,通常需要借助PWM调制技术,通过高频PWM的脉宽调制来近似输出正余弦电压。此外,控制器硬件上的相关电路匹配设计也是不可或缺的,它负责调整比例、偏置以及增加驱动能力等关键功能。
为了更直观地展示激励信号的产生过程,我们可以通过Simulink与Pspice的联合仿真来进行模拟。在Simulink中产生300kHz以上的高频PWM波形,而在PSpice中搭建一套实用的激励电路,从而观察并分析电路中的输出变化,即实际输入给旋变的激励信号形态。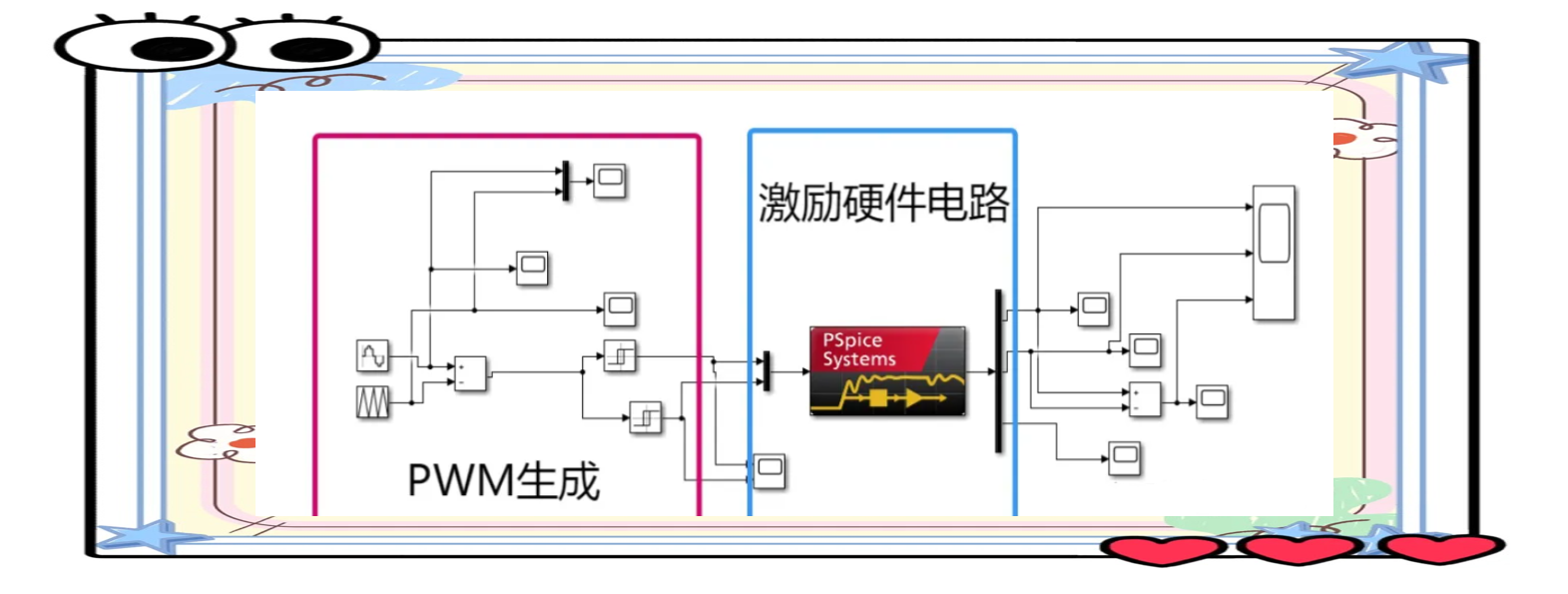
联合仿真模型
通过Simulink与PSpice的联合仿真,我们可以更直观地模拟激励信号的产生过程。在Simulink环境中,我们能够生成高达300kHz以上的高频PWM波形;而PSpice则用于搭建一套实用的激励电路,以便观察和分析电路中的输出变化,即实际提供给旋变的激励信号形态。这种联合仿真的方法,为我们深入理解旋变的工作原理和性能提供了有力的支持。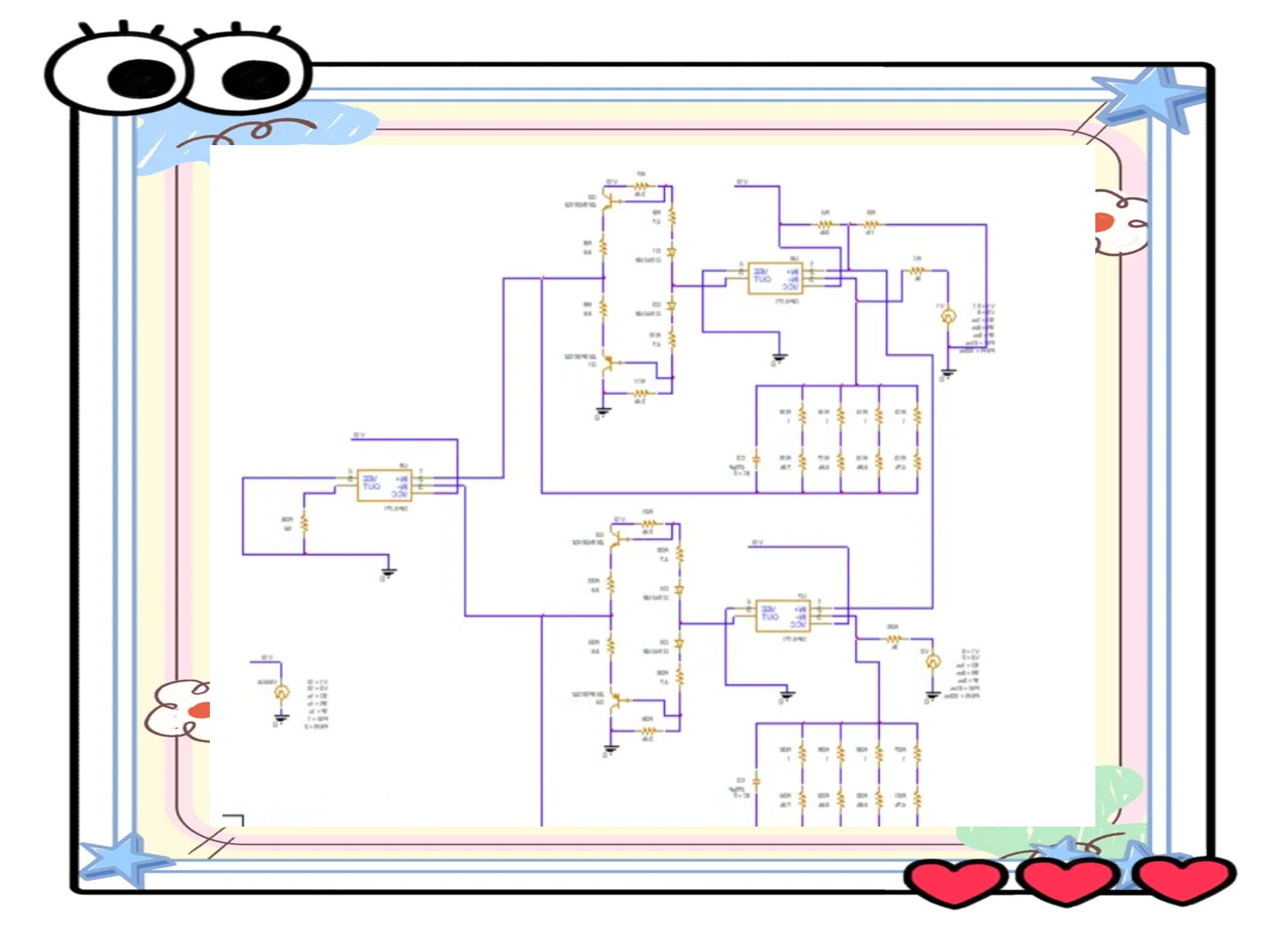
PSpice硬件模型
在联合仿真过程中,PSpice被用于构建详细的硬件模型,特别是激励电路的部分。这一模型能够实时地响应Simulink中生成的高频PWM波形,从而为我们提供一套完整的、实用的仿真系统。通过这一系统,我们可以观察到激励信号在电路中的实际传播情况,进一步深入理解旋变的工作特性。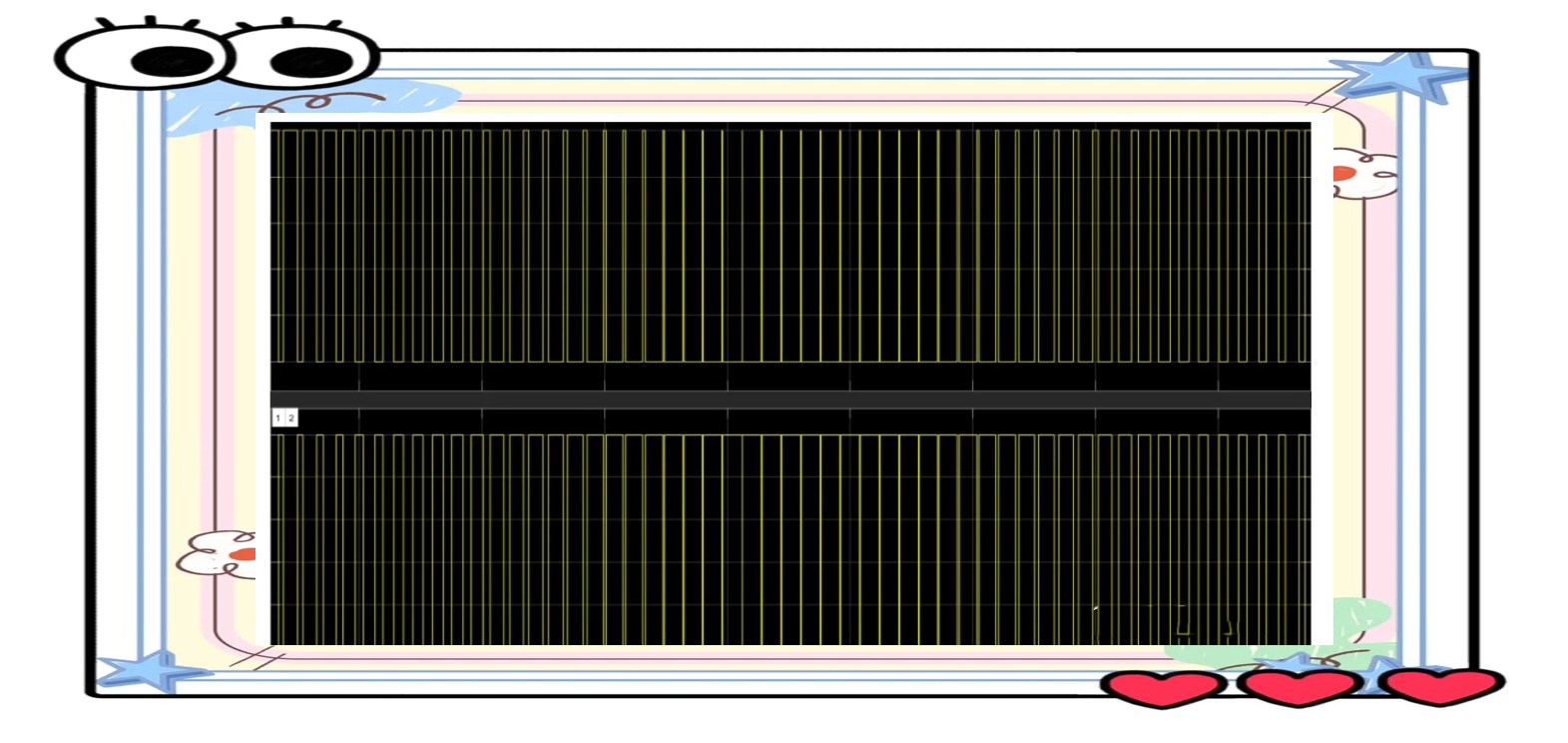
高频PWM信号产生的激励正负结果
在联合仿真环境中,当Simulink生成高频PWM波形时,PSpice硬件模型会实时响应这些激励。这种响应不仅体现在模型对激励的准确模拟上,更在于其能够展示激励在电路中的实际传播效果。通过观察这一过程,我们可以更深入地理解旋变的工作特性,以及高频PWM信号在电路中的作用机制。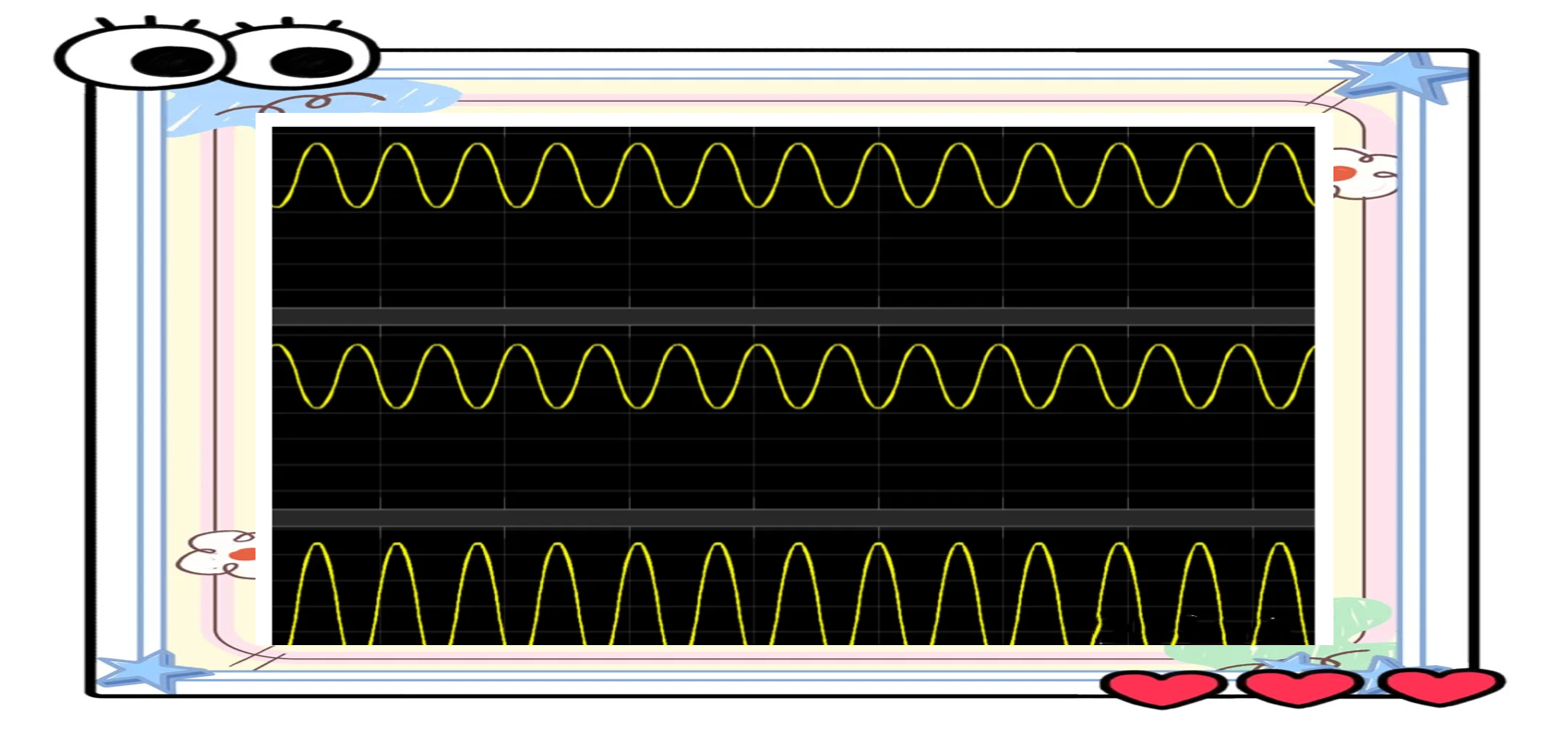
激励波形分析
在仿真过程中,我们观察到激励波形在峰值处略显削波,这主要是由于PWM生成环节中存在的两个relay模块所致。当PWM脉宽较窄时,可能无法满足relay中buffer的预设条件,从而导致峰值点波形略有缺失。
旋变标定探讨
旋变标定,这一概念在日常工作中可能有着不同的表述,如零位角标定、电机角标等,但其核心目的在于确定旋变与电机零位之间的角度偏差。旋变,作为绝对位置传感器,主要功能是提供电机转子位置的精确信息。然而,电机控制的核心在于定子磁场与转子磁场的协同作用,而定子磁场则是通过控制输出电流来形成的。因此,在实际应用中,我们更关心的是转子与定子之间的相对位置,而非转子的绝对位置。
为了实现旋变与电机之间的准确配合,我们需要进行旋变标定。这一过程旨在找出旋变零位与电机零位之间的偏差。通过寻找电机零位对应的旋变位置,我们可以确定这一偏差值。值得注意的是,旋变也可以被视为一种小型的旋转电机,其极对数概念与大型电机相似。在实际应用中,我们通常会选择极对数与大型电机相同的旋变作为传感器,以确保解码出的角度能够准确反映电机的电角度。若二者极对数不相等,则需要进行相应的换算处理。
举报/反馈